Abstract:
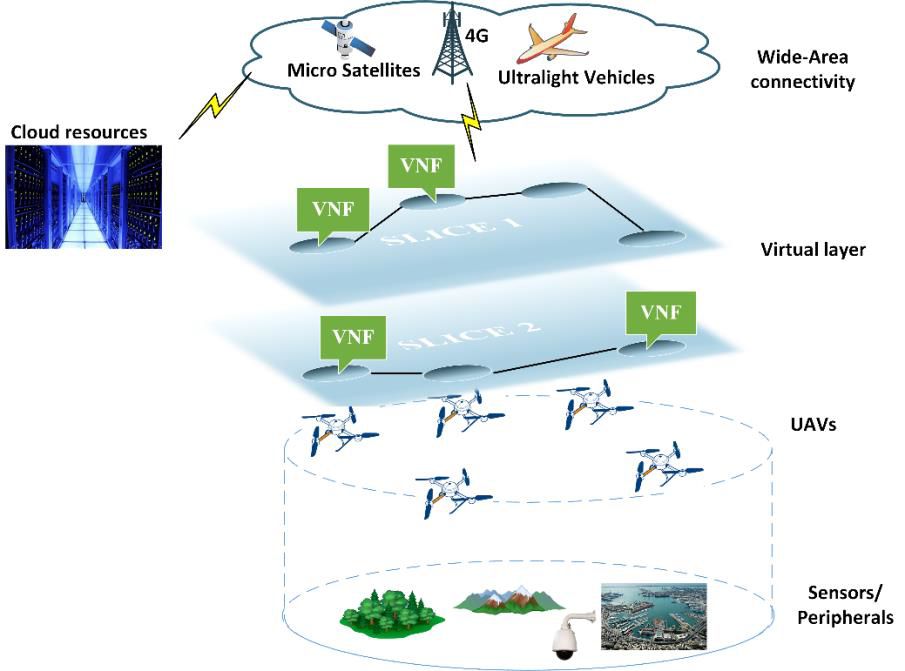
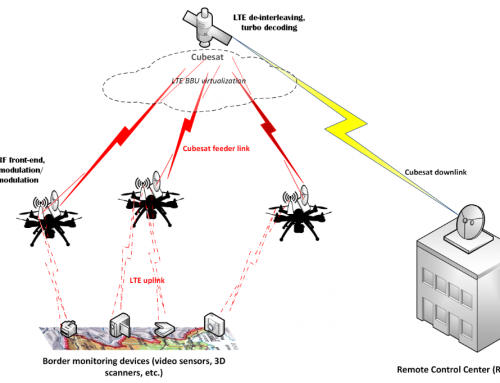
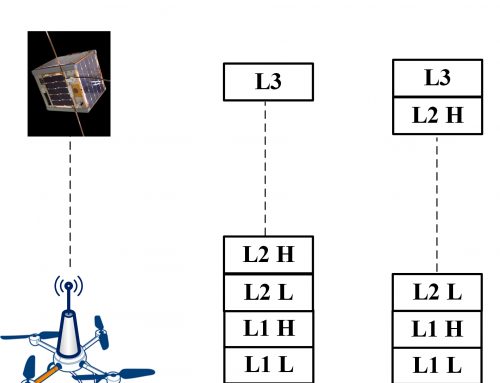
European borders are hard to be controlled in an effective and efficient way. The recent emergencies related to immigration revealed the substantial inefficiency of conventional means of border patrolling based on warships, coast guard speedboats and helicopters. A reliable technical answer to these emergency problems may come from the use of different kinds of unmanned aerial vehicles (UAVs). These flying vehicles may allow at improving border control. Nevertheless, such technologies require significant amount of personnel, energy and infrastructure to properly serve border protection. In order to be really effective, UAVs should autonomously cooperate in networked manner, collecting information from the on-ground and/or water-surface sensors, exchanging data among them and conveying the critical information to remote border control centres. This is the main objective of DAVOSS project (Dynamic Architectures based on UAVs Monitoring for border Security and Safety), funded by NATO in the framework of the Science for Peace and Security Programme. This paper aims at presenting the novel adaptive and virtualized aerospace network architecture proposed in DAVOSS. The leading concepts of DAVOSS are flexibility, dynamic reconfigurability, energy efficiency and broadband connection availability also in critical application scenarios. In order to improve robustness and resilience of the avionic network and to enable the efficient information backhaul also in absence of terrestrial links, advanced networking and communications technologies like Software-Defined Networking (SDN), network slicing and virtualization are introduced. System requirements, coming from potential end-users, along with real application scenarios will be carefully analyzed in order to drive the architectural design phase, whose preliminary outcomes will be shown in the paper. Preliminary results demonstrate the effectiveness of the adoption of virtualization techniques for the considered aerospace network architecture in terms of reduced power consumption at the drone side, with an observed tradeoff with latency.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}